
Projects
Model Predictive Control for a Multi-Agent System
Course project: Advanced Topics in Control (2025)
The goal of this project was to influence the behaviour of an entire swarm by only controlling a small subset of agents directly.
The swarm was modeled as a school of fish, where each fish followed simple rules based on local interactions with its neighbors as described in [Couzin et al., 2002].
We developed a Model Predictive Controller (MPC) that uses the Cross-Entropy Method (CEM) to solve a nonlinear, non-convex optimal control problem online and we investigated the influence of the number of controlled agents on the performance of the controller.
Below is a small interactive demo of the underlying interaction model. Your mouse is used to control the red fish directly. All other fish may only be influenced indirectly through interactions with the red fish.
Interactive demo of the fish school. Use your mouse to control the red fish and influence all others.
State Estimation for Bicycle Model
Course project: Recursive Estimation (2025)
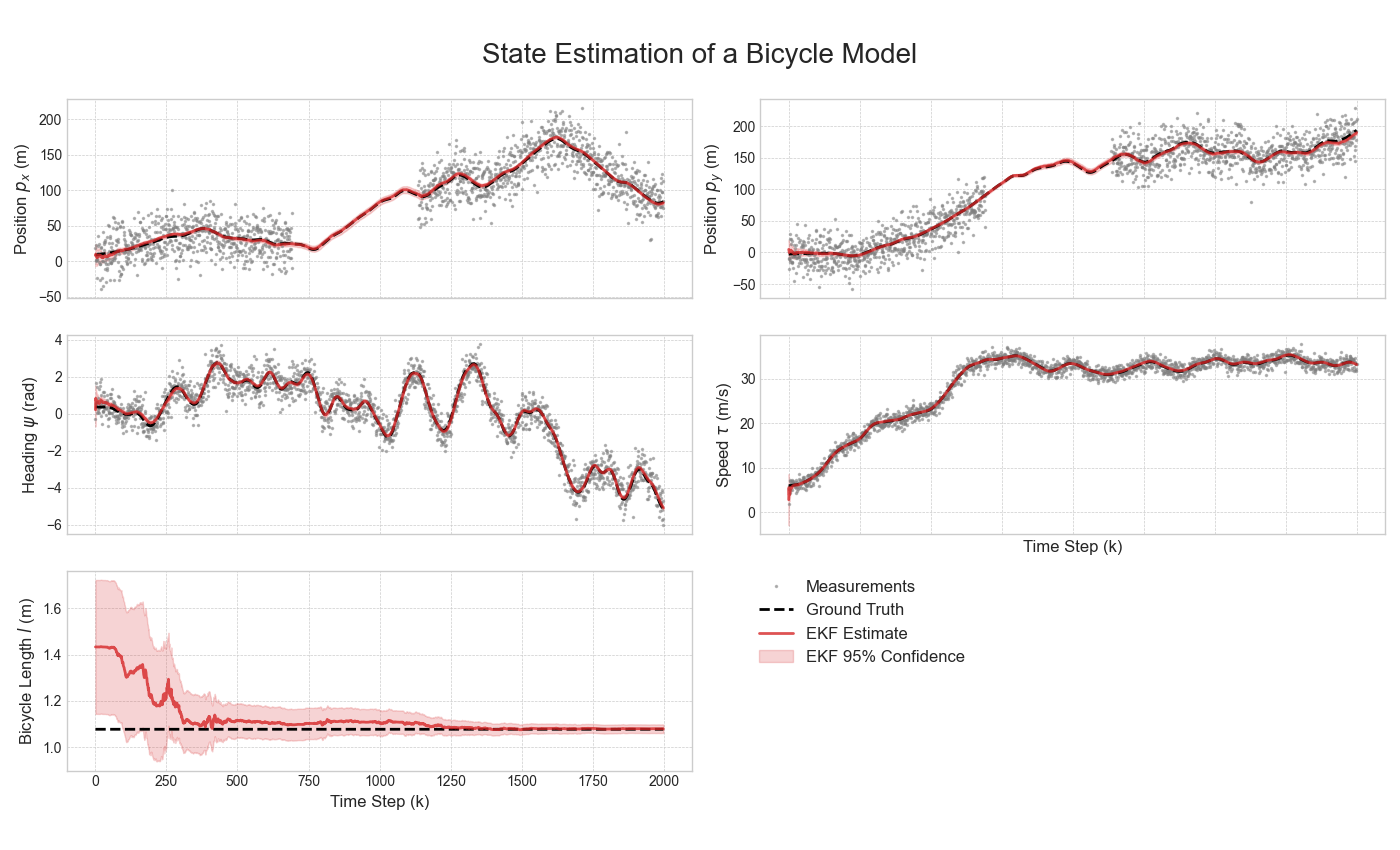
The goal of this project was to estimate the state (position, heading, speed) and the length of a bicycle from noisy and incomplete sensor data.
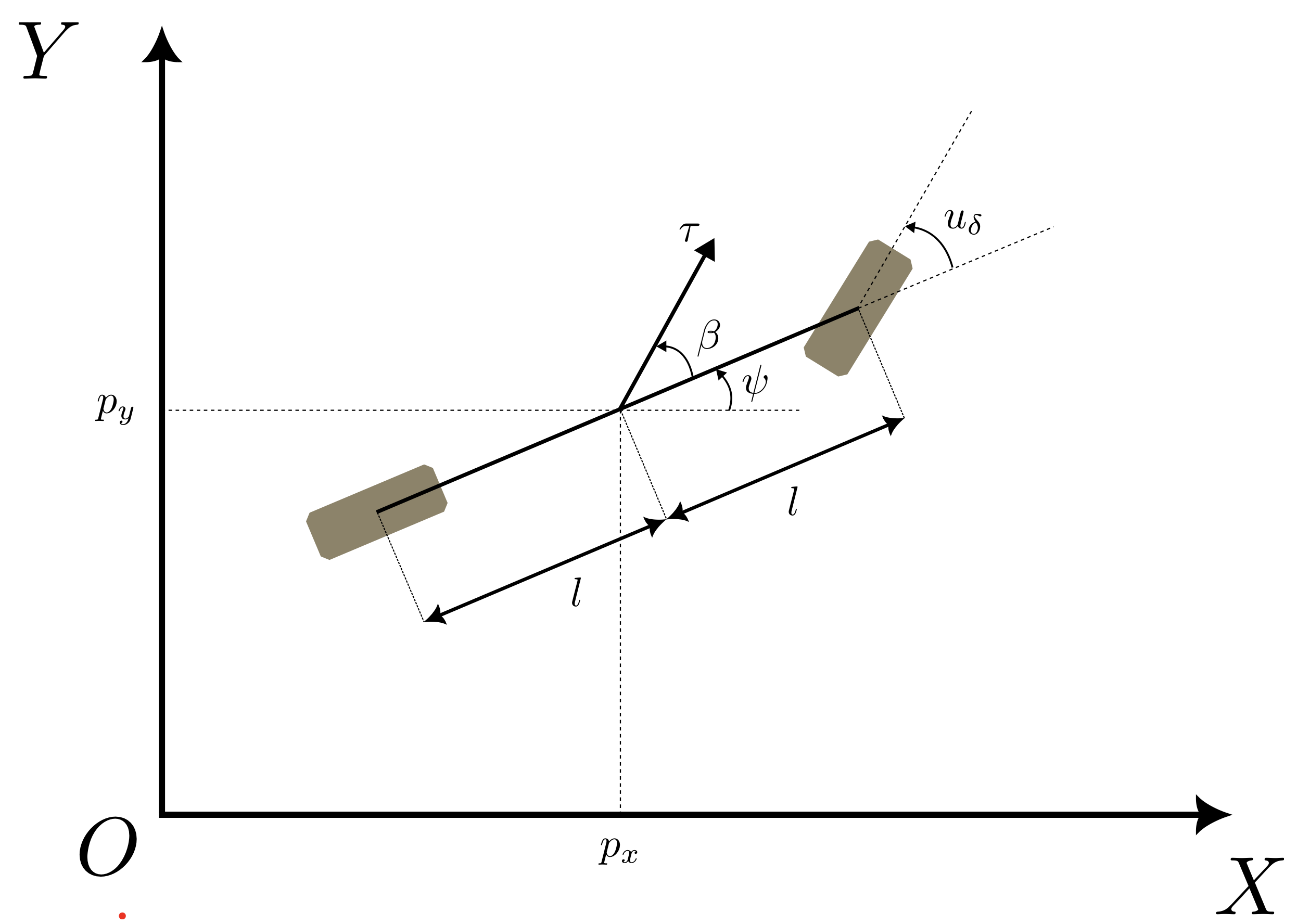
I successfully implemented and tuned an Extended Kalman Filter (EKF) and Particle Filter (PF) to handle the non-linear dynamics, noisy measurements, missing data and non-Gaussian noise distributions. The results of the EKF are shown below, where the estimated states closely track the ground truth.
Dynamic Speed Limits for Traffic Control
Course project: Computational Control (2025)
In this project, I had to act as a consultant for a ficticious city having issues with traffic congestion and grid lock. Different controllers for dynamic speed limits on highways were developed and evaluated in a given simulation environment built on SUMO.
I implement a model predictive controller with disturbance rejection and quantized move blocked inputs and two novel data-driven controllers, which learn a non-parametric model of the system (i.e. the system’s behaviour) directly from the training data - DeePC and TPC.
All controllers were able to reduce the CO2 emissions in the evaluation scenario by over 50% compared to the legacy P-Controller.